Gaussian homotopy is a technique that effectively spreads the gradient information of a non-convex function outward, helping the optimizer escape local minima.
Author
Simon Ghyselincks
Published
October 22, 2024
$$
$$
Motivation
So far we have examined optimization techniques using gradient descent and the Gauss-Newton method. These methods are powerful but can be limited by the presence of local minima in the optimization landscape. In this lecture we will explore a technique called Gaussian homotopy that can be used to escape local minima in optimization problems.
To recap the steps used so far in optimization, we have an objective \[\operatorname*{argmin}f(x),\]
where \(x \in \mathbb{R}^n\) is an unconstrained optimization variable. The minimizer can be sought by stepping iteratively in a descent direction — in general: \[x_{k+1} = x_k - \alpha_k H \nabla f(x_k),\]
where \(\alpha_k\) is the step size. The gradient \(\nabla f(x_k)\) can be computed explicitly or using automatic differentiation. The matrix \(H\) is a modifier that depends on the method being used: \[H =
\begin{cases}
I & \text{Gradient Descent} \\
(J^T J)^{-1} & \text{Gauss-Newton}
\end{cases}
\]
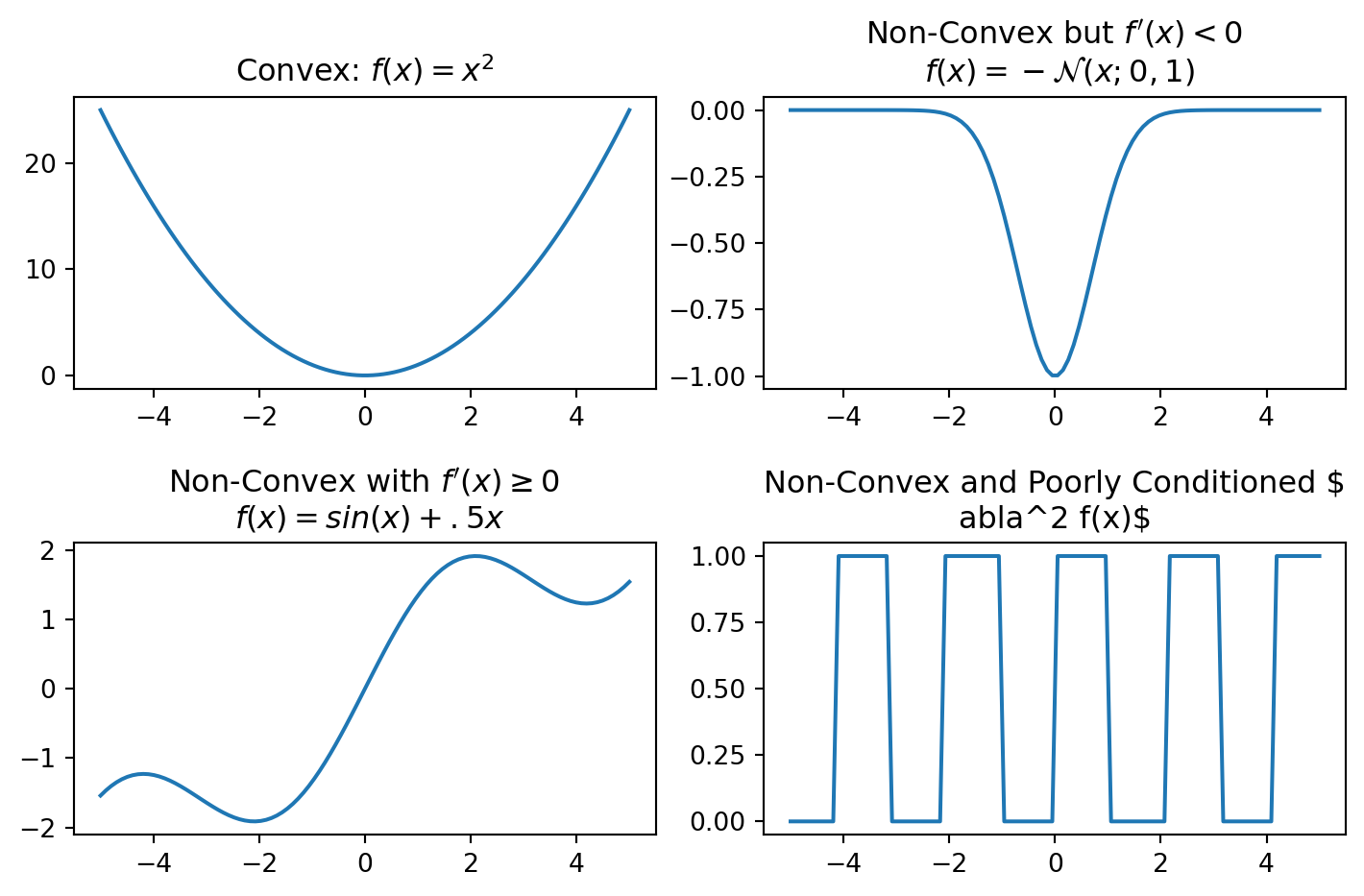
However, optimization is often performed on non-convex functions, in which case the path to a global minimum can be obstructed by local minima. Several categories of increasingly difficult functions are shown below.
Figure: Three categories of increasingly non-convex functions illustrating potential local minima that can obstruct the path to a global minimum.
Some examples for each of the categories are given in the following table:
Category
Function
Local Minima
Convex
\(f(x) = x^2\)
Global minimum at \(x=0\)
Non-Convex but \(f'(x)<0\)
\(f(x) = -\mathcal{N}(x; 0, 1)\)
Global minimum at \(x=0\)
Non-Convex with \(f'(x) \geq 0\)
\(f(A,B,w) = w^T \sigma (B \sigma (A x))\)
Multiple local minima
Non-Convex and Poorly Conditioned \(\nabla^2 f(x)\)
\(f(t) = x(t)^T A x(t), \quad x(t) = \text{square wave}\)
Multiple local minima and discontinuous
To illustrate these functions even more we can plot them as well.
Show the code
import numpy as npimport matplotlib.pyplot as pltx = np.linspace(-5, 5, 100)y1 = x**2y2 =-np.exp(-x**2)y3 = np.sin(x) +.5*x#square wavedef square_wave(x):return1if np.sin(3*x) >0else0y4 = [square_wave(xi)**2for xi in x]fig, ax = plt.subplots(2, 2)ax[0, 0].plot(x, y1)ax[0, 0].set_title("Convex: $f(x) = x^2$")ax[0, 1].plot(x, y2)ax[0, 1].set_title("Non-Convex but $f'(x)<0$ \n $f(x) = -\\mathcal{N}(x; 0, 1)$")ax[1, 0].plot(x, y3)ax[1, 0].set_title("Non-Convex with $f'(x) \\geq 0$ \n $f(x) = \\sin(x)+.5 x$")ax[1, 1].plot(x, y4)ax[1, 1].set_title("Non-Convex and Poorly Conditioned $\\nabla^2 f(x)$")plt.tight_layout()plt.show()
Function Categories.
Direct Search Methods
A direct search (Wikipedia 2024) can be performed to try to find the global minimum of a non-convex function (Lewis et al. 2000).
In this case the direction does not follow the gradient descent rule, and there may be a stochastic element. The general algorithms that implement this have the property that the step size decreases over time, such that
\[ \| \alpha_k d_k \| \to 0, \ k \to \infty\]
The implementation does not seek information about the gradient or the Hessian of the function. Instead, points in the surrounding region are evaluated, and the step giving the best decrease is selected.
The method has been known since the 1950s but it fell out of favour due to the slow rate of convergence. However, with parallel computing advances it has become more feasible to use again. For a large set of direct search methods, it is possible to rigorously prove that they will converge to a local minimum (Kolda et al. 2003).
Homotopy
In mathematics, homotopy refers to the continuous transformation of one function into another. In optimization, homotopy—or continuation optimization—is used to transform a highly non-convex function into a simpler, often more convex surrogate function. This approach enables the optimizer to escape local minima and approach a global minimum by incrementally tackling easier, intermediate optimization problems.
The core idea behind homotopy optimization is to relax a difficult optimization problem into a series of smoother problems that gradually resemble the original objective function. This relaxation process spreads the gradient and Hessian information outward, making the function landscape easier to navigate and minimizing the risk of getting stuck in local minima.
This can be accomplished using a convolution with a simple function as a kernel. The kernel can have variable width, giving varying degrees of relaxation, which we parameterize using a time variable \(t\). As \(t \to 0\) the function approaches the original function, and as \(t \to 1\) it approaches the fully smoothed function. The homotopy between the two is parameterized by \(t \in [0, 1]\).
In the case of optimization, the technique is known as homotopy optimization or continuation optimization. The optimization process starts with the smoothed function and then gradually moves back to the original function, using the solution of each relaxed problem as the starting point for the next. This is known as a continuation method, and the scheduling of the homotopy parameter \(t\) is the continuation schedule. A summary description with more details and advanced techniques can be found in the work by Lin et al. (Lin et al. 2023).
Example
Let \(f(x)\) be the original function and \(g(x)\) be the smoothing function. The homotopy function \(h(x, t)\) can be defined as an interpolation between the two functions:
\[h(x, t) = (1-t) f(x) + t g(x).\]
This new function has the important property that \(h(x,0) = f(x)\) and \(h(x,1) = g(x)\) so it represents a continuous path of deformation between the two functions, beginning at \(t=1\) with a simpler relaxed problem and ending at \(t=0\) with the original problem.
The new minimization problem becomes:
\[\operatorname*{argmin}_{\mathcal{X}} h(x, t).\]
A schedule can be set up for the times so that a series of times \(\{t_0, t_1, \dots t_k, \ldots, t_n\}\) are used to solve the problem. We solve at \(t_0 = 1\) and then gradually decrease the value of \(t\) to \(0\). The solution \(x_k\) at \(t_{k}\) is used as the starting point for the next iteration \(t_{k+1}\) until reaching \(t_n = 0\).
In the case where the values of \(x\) may be constrained, this becomes similar to the Interior Point Method, where the constraints are relaxed and then gradually tightened.
Gaussian Homotopy
A common case of homotopy is the Gaussian homotopy, where the smoothing function is a Gaussian. The Gaussian function is widely used in signal processing and image processing due to its properties as a low-pass filter. For example, a Gaussian blur is applied to images to aid in downsampling, since it preserves the lower-resolution details while removing high-frequency content that may cause aliasing.
To illustrate the low-pass filtering property, consider a Gaussian function \(g(x)\) and its Fourier transform \(\hat{g}(k)\):
The Fourier transform of a Gaussian is another Gaussian — indeed, the Gaussian is an eigenfunction of the Fourier transform operator. The convolution theorem states that the convolution of two functions in the spatial domain is equivalent to the multiplication of their Fourier transforms in the frequency domain:
The convolution of a function \(f(x)\) with a Gaussian \(g(x)\) can be used to remove the high-frequency components of the function while allowing the low-frequency, widely spread components to remain.
A wide Gaussian in the time domain corresponds to a narrow Gaussian in the frequency domain, and vice versa. So a wide Gaussian only lets through the lowest frequencies, while a narrow Gaussian lets through a wide band of frequencies. In the limit as the Gaussian becomes infinitely narrow, it becomes a delta function \(g(x) = \delta(x)\) in the time domain — a constant function \(\hat{g}(k) = 1\) in the frequency domain. The convolution of a function \(f\) with a delta function returns \(f\) itself; equivalently, multiplying \(\hat f(k)\) by the constant function \(1\) leaves it unchanged in the frequency domain.
Show the code
import numpy as npimport matplotlib.pyplot as pltfrom scipy.fftpack import fft, ifft, fftfreq, fftshiftfrom matplotlib.animation import FuncAnimation# Generate a square wave in the time domaindef square_wave(t, period=1.0):"""Creates a square wave with a given period."""return np.where(np.sin(2* np.pi * t / period) >=0, 1, -1)# Time domain setupt = np.linspace(-1, 1, 500)square_wave_signal = square_wave(t)freq = fftfreq(t.size, d=(t[1] - t[0]))square_wave_fft = fft(square_wave_signal)# Function to update the plot for each frame, based on current sigma_tdef update_plot(sigma_t, axs, time_text): sigma_f =1/ (2* np.pi * sigma_t) # Standard deviation in frequency domain gaussian_time_domain = np.exp(-0.5* (t / sigma_t)**2) gaussian_filter = np.exp(-0.5* (freq / sigma_f)**2) filtered_fft = square_wave_fft * gaussian_filter smoothed_signal = np.real(ifft(filtered_fft))# Update each subplot with new data axs[1, 0].clear() axs[1, 0].plot(t, gaussian_time_domain, color="purple") axs[1, 0].set_title("Gaussian Filter (Time Domain)") axs[1, 0].set_xlabel("Time") axs[1, 0].set_ylabel("Amplitude") axs[1, 0].grid(True) axs[1, 1].clear() axs[1, 1].plot(fftshift(freq), fftshift(gaussian_filter), color="orange") axs[1, 1].set_title("Gaussian Low-Pass Filter (Frequency Domain)") axs[1, 1].set_xlabel("Frequency") axs[1, 1].set_ylabel("Amplitude") axs[1, 1].set_xlim(-50, 50) axs[1, 1].grid(True) axs[2, 0].clear() axs[2, 0].plot(t, square_wave_signal, color="green", linestyle="--") axs[2, 0].plot(t, smoothed_signal, color="red") axs[2, 0].set_title("Smoothed Signal (Time Domain)") axs[2, 0].set_xlabel("Time") axs[2, 0].set_ylabel("Amplitude") axs[2, 0].grid(True) axs[2, 1].clear() axs[2, 1].plot(fftshift(freq), fftshift(np.abs(square_wave_fft)), color='blue', linestyle='--') axs[2, 1].plot(fftshift(freq), fftshift(np.abs(filtered_fft)), color="orange") axs[2, 1].set_title("Filtered Spectrum (Frequency Domain)") axs[2, 1].set_xlabel("Frequency") axs[2, 1].set_ylabel("Amplitude") axs[2, 1].set_xlim(-30, 30) axs[2, 1].grid(True)# Update the time text time_text.set_text(f"T = {T:.2f}")# Initialize the figure and plot layout for animationfig, axs = plt.subplots(3, 2, figsize=(12, 10)) # Increased figure size for animationaxs[0, 0].plot(t, square_wave_signal, color='green')axs[0, 0].set_title("Square Wave (Time Domain)")axs[0, 0].set_xlabel("Time")axs[0, 0].set_ylabel("Amplitude")axs[0, 0].grid(True)axs[0, 1].plot(fftshift(freq), fftshift(np.abs(square_wave_fft)), color='blue')axs[0, 1].set_title("Fourier Transform of Square Wave (Frequency Domain)")axs[0, 1].set_xlabel("Frequency")axs[0, 1].set_ylabel("Amplitude")axs[0, 1].set_xlim(-30, 30)axs[0, 1].grid(True)# Add a text annotation for time at the bottom of the figure with extra spacetime_text = fig.text(0.5, 0.02, "", ha="center", fontsize=12) # Adjusted position for clarity# Adjust subplot spacing specifically for animationplt.tight_layout(rect=[0, 0.05, 1, 1]) # Extra space at the bottom for time text# Animation settingssteps =100def animate(frame):global T # Declare T as a global variable for use in update_plot T =1- (frame / steps) # Scale frame number to a T value between 1 and 0 sigma_t =0.5* T +0.001* (1- T) # Interpolate sigma_t update_plot(sigma_t, axs, time_text)# Create and display the animationani = FuncAnimation(fig, animate, frames=steps, interval=100)# Save the animation as a GIFani.save('imgs/gaussian_homotopy.gif', writer='imagemagick', fps=8)plt.show()
For Gaussian homotopy, the continuous transformation between the original function and the relaxed version is given by a convolution with a Gaussian kernel. We let \(\sigma(t)\) be the standard deviation of the Gaussian kernel at time \(t\). The deviation will be \(\sigma(0) = 0\) and \(\sigma(1) = \sigma_{\text{max}}\) so that the homotopy at any time \(t\) is given by:
The Gaussian kernel should be divided by its partition function \(z(t) = \int \exp(-\frac{\xi^2}{\sigma(t)^2}) d\xi\) in theory so that the kernel is normalized, but for the use case where \(h(x, t)\) is used as a surrogate function for optimization, the partition function \(z(t)\) does not change the minimizer of the function.
Stochastic Optimization
Since the objective involves minimizing the integral defining \(h(x, t)\), a stochastic method can be used to estimate the minimizer in expectation using Monte Carlo methods. The integral can be approximated (up to normalization) by sampling \(N\) points from the Gaussian kernel and averaging the function values at those points:
For a given \(t\) and point \(x\) where we want to estimate the function \(h(x, t)\), we can sample \(N\) points from a Gaussian kernel centered at \(x\) with standard deviation \(\sigma(t)\) and evaluate the function at those points. The average of the function values at those points will be an estimate of the function value at \(x\).
Implementation Choices
There are two ways to approach this problem when using numerical methods.
Discretize then Optimize: The integral is first discretized by choosing a set of points \(\{\xi_1, \xi_2, \ldots, \xi_N\}\), and then the objective is evaluated using that same discrete kernel throughout the optimization:
This sum can end up being large if many points are selected.
Optimize then Discretize: In this case we start with gradient descent on the continuous function \(h(x, t)\), and then sample the function at points \(\{\xi_1, \xi_2, \ldots, \xi_N\}\) to estimate the gradient at each step:
This formulation can technically converge even with \(N = 1\), although convergence will be very slow.
Now that the Gaussian homotopy has been introduced, we can move on to the implementation of the algorithm.
Code Implementation
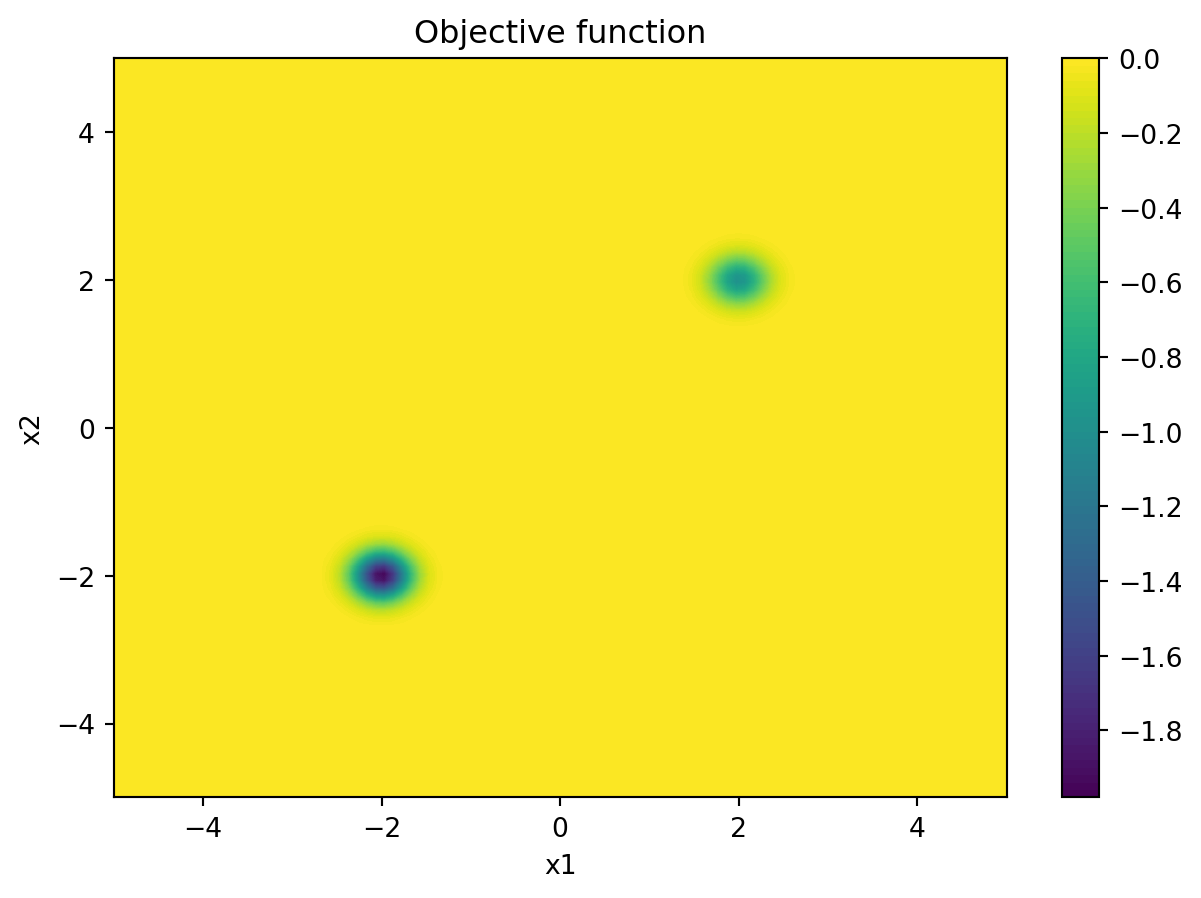
As usual when studying a problem, we come up with a suitable toy example. In this case it should be a function that has multiple minima, is non-convex, and has a poorly conditioned Hessian.
The function is a superposition of two negative Gaussian wells, with a local minimum at \((2, 2)\) and the deeper global minimum at \((-2, -2)\), but with very little gradient information far away from the minima.
Show the code
import matplotlib.pyplot as pltimport torchdef objective_function(X):""" A 2D function with multiple local minima. Parameters: X (torch.Tensor): A tensor of shape (N, 2) containing the input points. """ x1 = X[:, 0] x2 = X[:, 1] y =-torch.exp(-((x1 -2)**2+ (x2 -2)**2) /0.1) \-2* torch.exp(-((x1 +2)**2+ (x2 +2)**2) /0.1)return y# plot the functionx1 = torch.linspace(-5, 5, 100)x2 = torch.linspace(-5, 5, 100)X1, X2 = torch.meshgrid(x1, x2, indexing='ij')X = torch.stack([X1.flatten(), X2.flatten()], dim=1)y = objective_function(X).reshape(100, 100)plt.contourf(X1, X2, y, levels=100)plt.colorbar()plt.xlabel('x1')plt.ylabel('x2')plt.title('Objective function')plt.show()
Objective Function of Two Gaussians.
The next step is to create a time-parameterized function \(h(x, t)\) that is the Gaussian homotopy of \(f(x)\). In practical terms, the starting \(\sigma_{\text{max}}\) is modulated by the \(t\) parameter when multiplied with the random noise. At \(t=0\) the function is the original function, and at \(t=1\) the function is numerically convolved with a \(\mathcal{N}(0, \sigma_{\text{max}}^2)\) Gaussian kernel. The time points in between trace a homotopy between the two functions.
def gaussian_homotopy(func, x, batch_size=1000, sigma=1.0, t=0.5):""" Computes the Gaussian homotopy function h(x, t) using Monte Carlo approximation. Args: func: The original objective function to be optimized. x: A tensor of shape (N, D), where N is the number of points and D is the dimension. batch_size: Number of samples to use in Monte Carlo approximation. sigma: Standard deviation of the Gaussian kernel. t: Homotopy parameter, varies from 0 (original function) to 1 (smoothed function). Returns: y: A tensor of shape (N,), the approximated h(x, t) values at each point x. """ N, D = x.shape# Sample from the t=1 gaussian kernel kernel = torch.randn(batch_size, D) * sigma# Repeat x and z to compute all combinations x_repeated = x.unsqueeze(1).repeat(1, batch_size, 1).view(-1, D) kernel_repeated = kernel.repeat(N, 1)# Compute the monte carlo set of points surrounding each x x_input = x_repeated - t * kernel_repeated# Evaluate the function at the sampled points y_input = func(x_input)# Reshape and average over the batch size to approximate the expectation y = y_input.view(N, batch_size).mean(dim=1)return y
This variation of the function can be seen as having extra parameters:
The time parameter modulates the standard deviation of the Gaussian kernel, and the number of samples \(N\) is used to approximate the expectation of the function at each point. As time goes to zero, we approach the original function. By animating this process, it is possible to see the stochastic homotopy in action.
This lecture has covered the theory behind homotopy, its action in the frequency and time domains, and its purpose in optimization. The design of continuation schedules for the homotopy parameter remains an area of active research. A more detailed analysis of how to implement the technique in a practical setting can be found in Lin et al. (Lin et al. 2023).
References
Kolda, Tamara G., Robert Michael Lewis, and Virginia Torczon. 2003. “Optimization by Direct Search: New Perspectives on Some Classical and Modern Methods.”SIAM Review 45 (3): 385–482. https://doi.org/10.1137/s003614450242889.
Lewis, Robert Michael, Virginia Torczon, and Michael W. Trosset. 2000. “Direct Search Methods: Then and Now.”Journal of Computational and Applied Mathematics 124 (1–2): 191–207. https://doi.org/10.1016/s0377-0427(00)00423-4.
Lin, Xi, Zhiyuan Yang, Xiaoyuan Zhang, and Qingfu Zhang. 2023. Continuation Path Learning for Homotopy Optimization. arXiv. https://doi.org/10.48550/ARXIV.2307.12551.
 Figure: Three categories of increasingly non-convex functions illustrating potential local minima that can obstruct the path to a global minimum.
Figure: Three categories of increasingly non-convex functions illustrating potential local minima that can obstruct the path to a global minimum.