Introduction
Project Overview
Welcome to our self-balancing unicycle robot capstone project! We are a team of undergraduate UBC Engineering Physics students working on our final academic checkpoint as engineering students before being released into the wild. This project is directly sponsored by the UBC Engineering Physics Project Lab.
Objective
Our goal is to design and develop a self-balancing reaction wheel robot that can navigate autonomously and be used as a platform to compare traditional control methods with reinforcement learning. The spirit of the project is to explore some of the challenges in implementing advanced control strategies on a real-world system. This includes bridging the gap between simulated models and real applications, coordinating peripherals with low latency, and designing hardware for controllability. It also presents a great opportunity to apply some fundamental physics and engineering concepts in a hands-on challenge.
Inspiration and Background
Our work draws on previous advances made in robotics. Notably, the Max Planck Institute’s Wheelbot project has served as a significant source of inspiration, many of our design choices and control strategies are influenced by their work. We aim to build on their development with a more advanced control and motor system that can navigate autonomously and adapt to dynamic disturbances using reinforcement learning.
The Robot
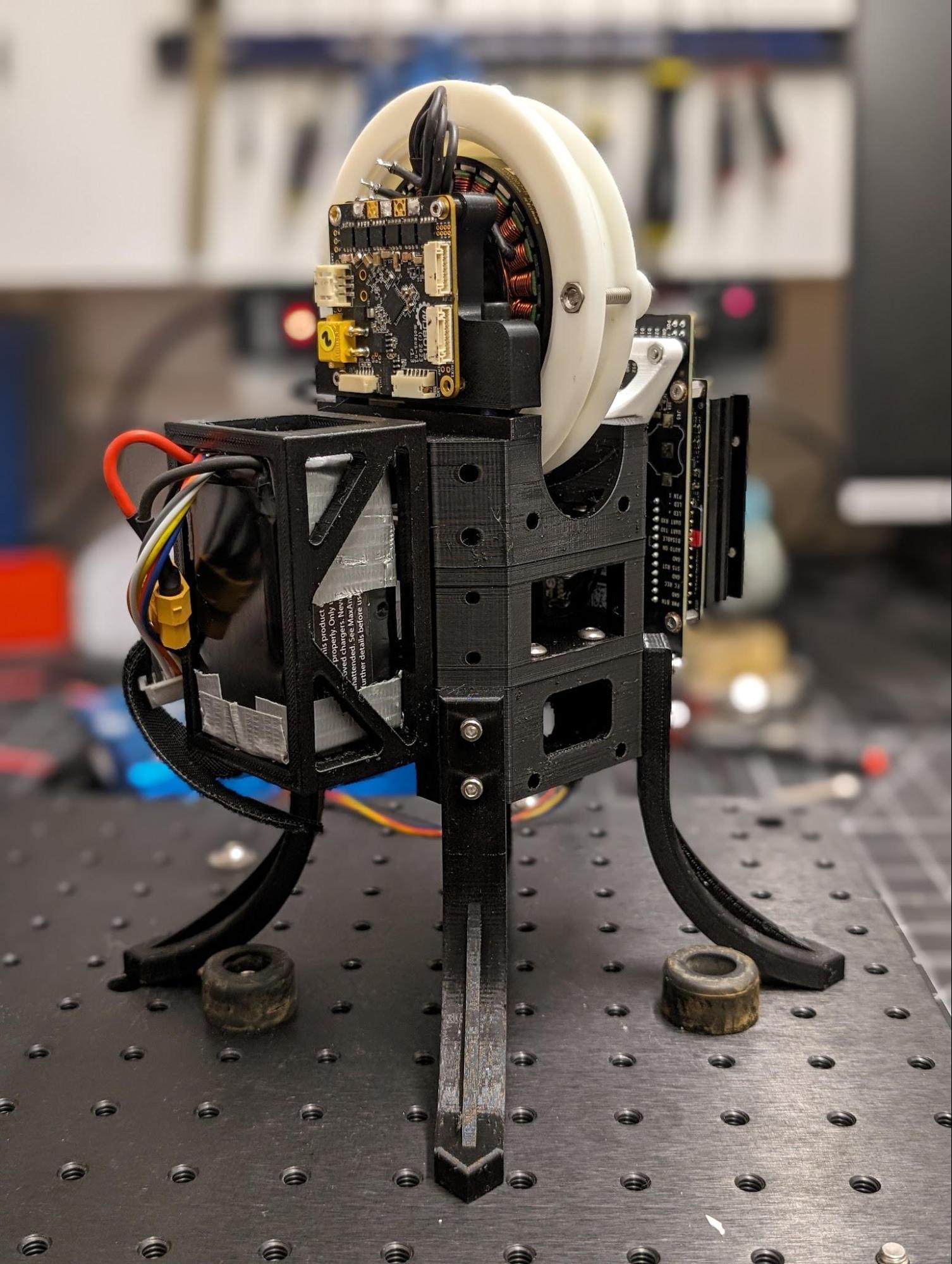
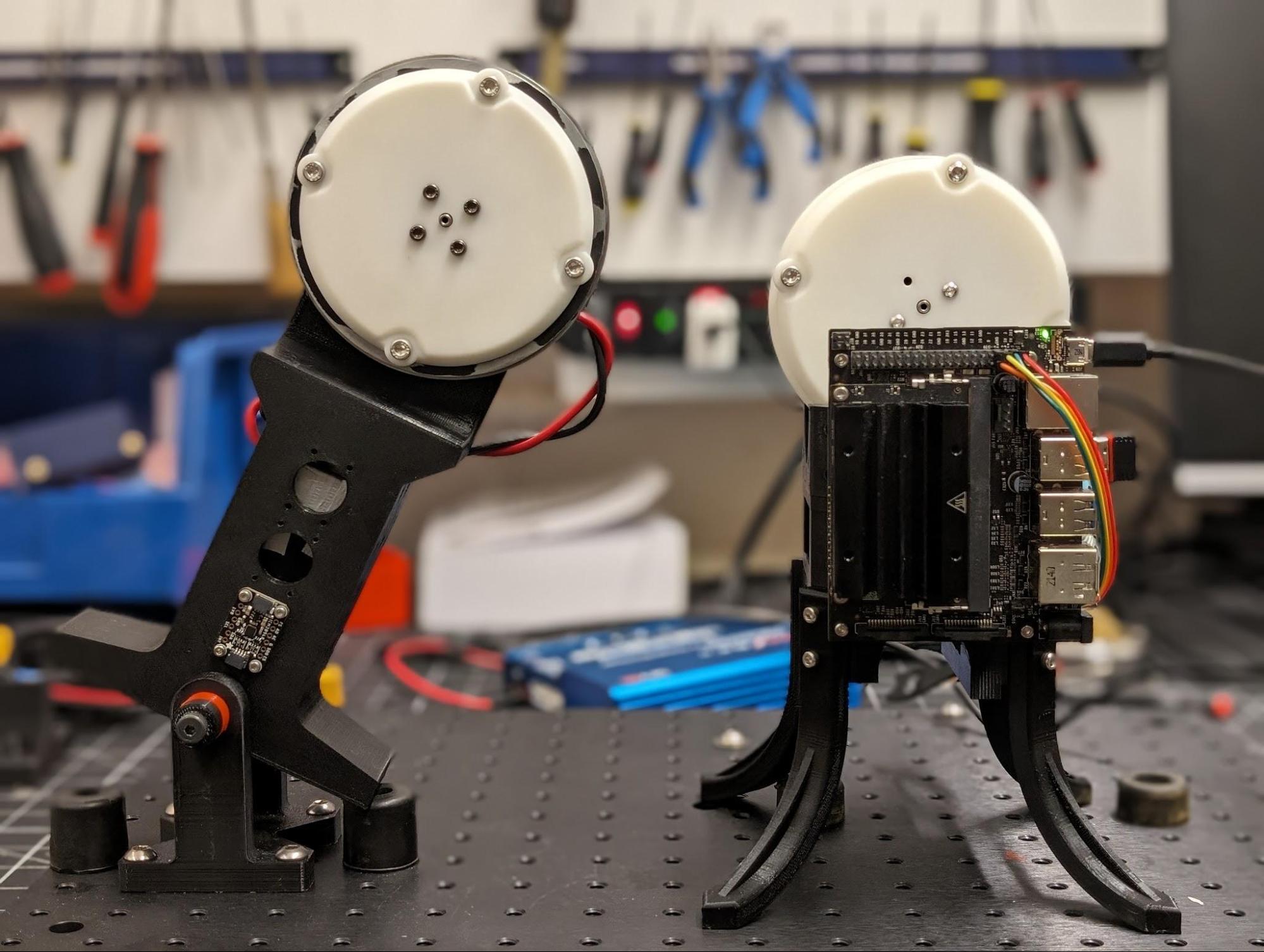
The robot is composed of two reaction wheels, a single drive wheel, a controller, and a battery, all mounted on a 3D printed PLA frame. It has a total height of 30cm and a weight of 1.25kg, incorporating a compact and efficient design intended to allow self-erection from a position resting on its resetting legs. The Jetson Nano acts as an autonomous controller that reads the sensors and reacts to the environment using the motors.
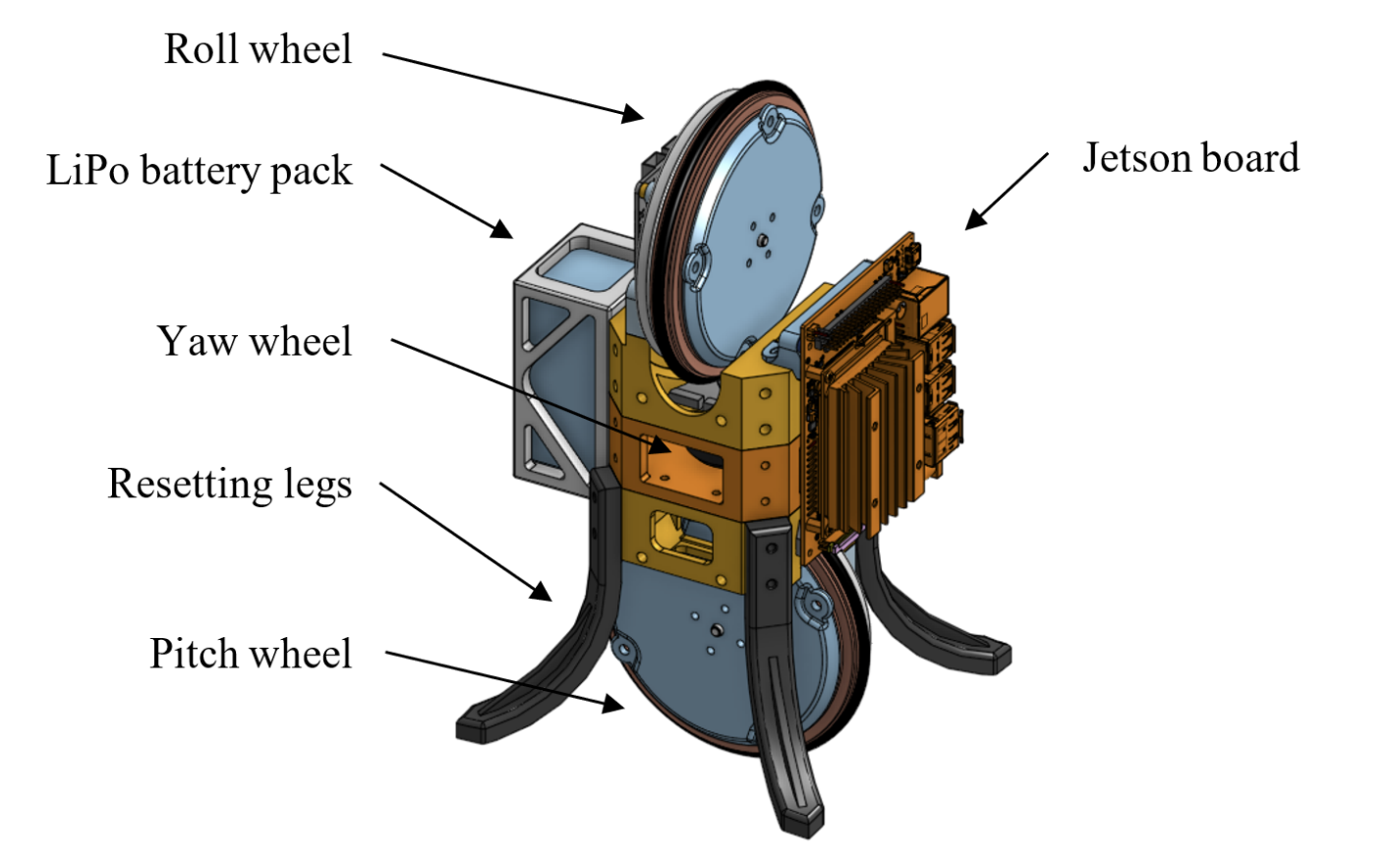
Much like a unicycle, it balances on one wheel, with side-to-side stability provided by the roll wheel and direction controlled by a yaw wheel. The mechanism of balancing and steering relies on a reaction torque produced by spinning the reaction wheels. When a motor applies torque to one of the flywheels, an equal and opposite torque acts on the robot’s body, with the net effect altering the angular motion of both the wheel and the robot. The unstable axes to control are roll and pitch where the robot will fall to the ground without any intervention.
The Challenge
Robotics often confronts complex dynamics that are difficult to model precisely. Traditional control systems, while reliable under predictable conditions, may falter with unexpected disturbances. This project explores how Reinforcement Learning can enable our unicycle robot to adapt through trial and error, improving its decision-making capabilities in a dynamic environment.
Prototyping and Progress
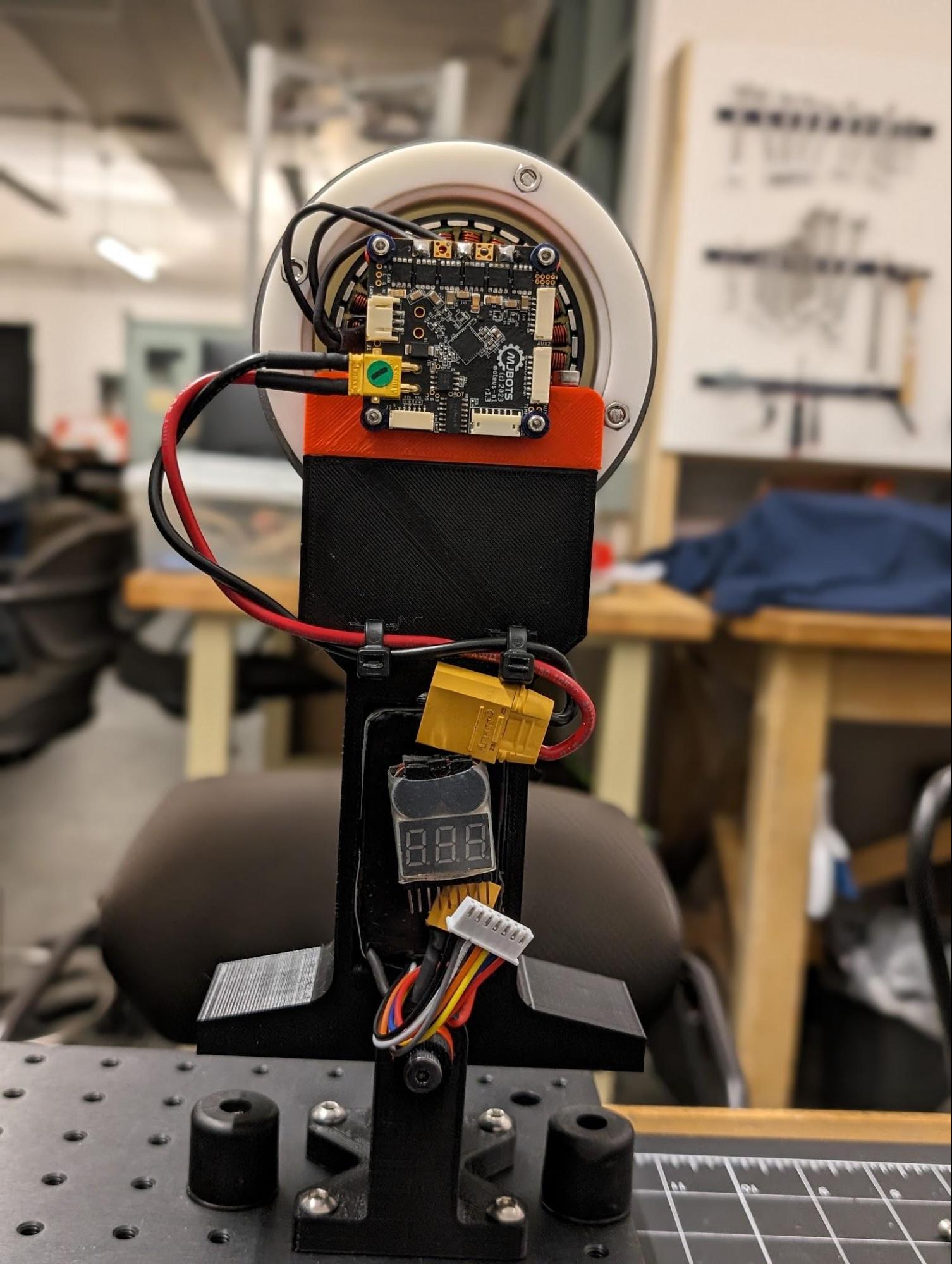
We have initiated our project with a Reaction Wheel Inverted Pendulum (RWIP) model to understand and tackle the unstable roll axis dynamics. Our efforts so far have included the application of both a traditional PID controller and an RL controller, with the latter showing promising results in handling dynamic disturbances aggressively yet effectively. With the completion of a function 2-DOF underactuated model, we are now moving towards the development of a full-scale 3-axis robot prototype.

Looking Ahead
The insights gained from the RWIP will guide the development of the full-scale robot, with the eventual integration of state-space models for sophisticated control strategies and enhanced point-to-point navigation.
Development Pages
Explore the detailed development of specific components of our project:
| Component | Description |
|---|---|
| Real-Time Kernel | Dive into how we handle real-time constraints on the Jetson Nano. |
| Telemetry | Discover how our system communicates and processes real-time data. |
| Dynamics and Control | Learn about the dynamic modeling and control of our robot prototype. |