Lecture 11
Score Matching and Diffusion
$$
$$
Score Matching
Previously, in Lecture 10, the concept of the score as the gradient of the log-likelihood was introduced.
For a probability distribution \(\pi(x, \theta)\) parameterized by \(\theta\), the distribution can be thought of as a potential function \(\phi(x, \theta)\) which is normalized by the partition function \(Z(\theta)\):
\[ \pi(x; \theta) = \underbrace{\frac{1}{Z(\theta)}}_{\text{Partition}} \exp(-\underbrace{\phi(x; \theta)}_{\text{Potential}}) \]
The score is defined as:
\[s(x; \theta) := \nabla_x \log \left(\pi(x)\right) = -\nabla_x \phi(x;\theta)\]
The Big Idea
Score matching was first proposed by Hyvärinen in 2005 (Hyvärinen 2005) as a method to estimate model parameters without computing the partition function \(\frac{1}{Z(\theta)}\), which is often computationally expensive or intractable.
Hyvärinen suggested directly matching the score of the model to the score of the data by minimizing the expected squared difference between them:
\[ \min_\theta \mathbb{E}_{x \sim \pi(x)} \left[ \left\| s_{\theta}(x) - s_{\text{true}}(x) \right\|^2 \right] \]
Intuitive Explanation
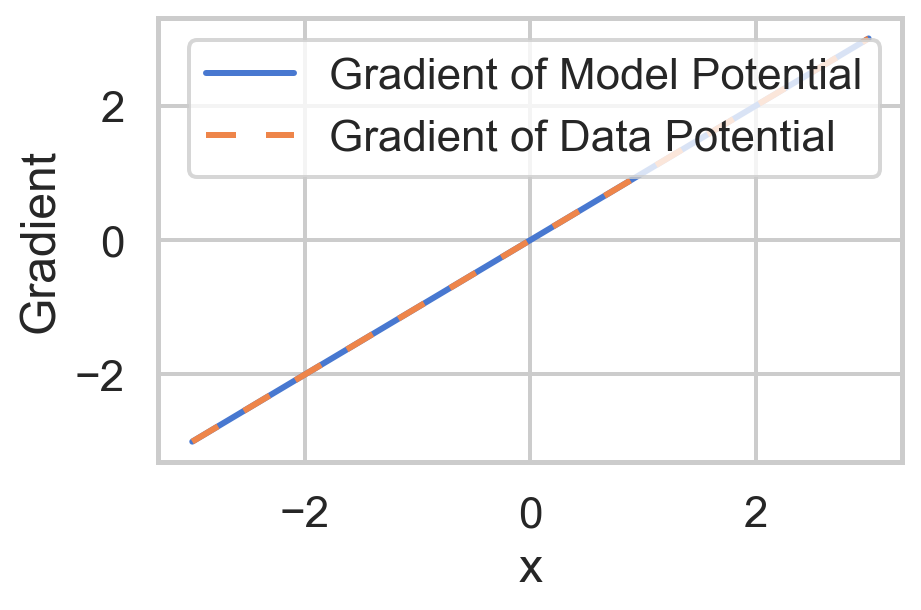
- If the gradients of two potential functions are equal, the functions themselves differ by at most a constant:
\[ \begin{align*} \nabla_x \phi(x; \theta) &= \nabla_x \phi_\text{true}(x) \implies\\ \phi(x; \theta) &= \phi_\text{true}(x) + C \end{align*} \]
where \(C\) is a constant independent of \(x\). This follows from the fundamental theorem of calculus and is analogous to the principle in physics that two potentials producing the same field differ by a constant.
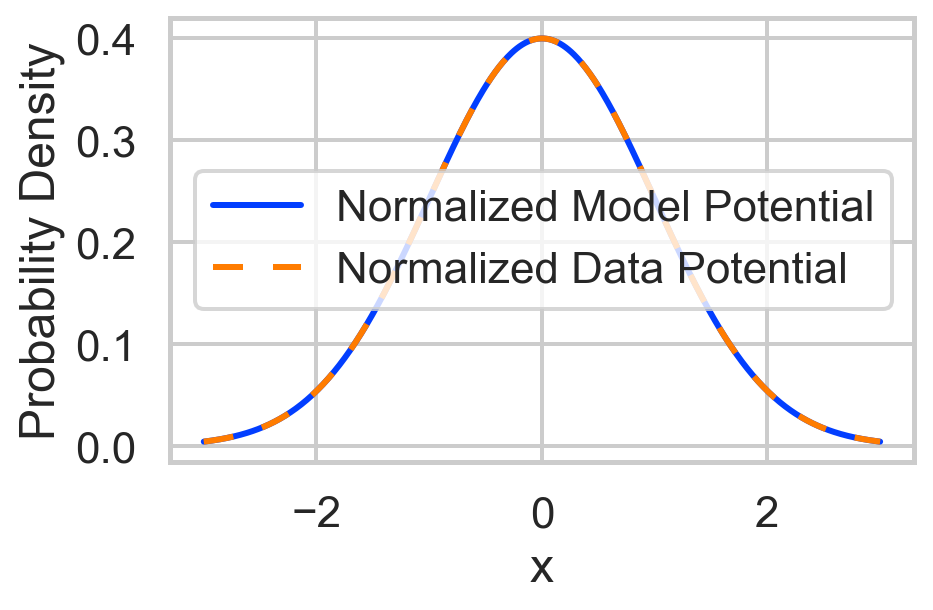
- Normalization by the partition function \(Z(\theta)\) does not affect the relation between the potentials:
The partition function \(Z(\theta)\) adjusts for any constant differences between the potential functions, ensuring the probability distributions are properly normalized:
\[ \begin{align*} \pi(x) &= \frac{1}{Z(\theta)} \exp(-\phi(x; \theta)) \\ &= \frac{1}{Z(\theta)} \exp(-\phi_\text{true}(x) - C) \\ &= \frac{\exp(-C)}{Z(\theta)} \exp(-\phi_\text{true}(x)) \\ &= \frac{1}{Z_{\text{true}}} \exp(-\phi_\text{true}(x)) \\ \end{align*} \]
The relation between the two functions is preserved by the partition function, which absorbs the constant factor \(e^{-C}\) arising from a potential difference of \(C\). The probability distributions must therefore be equal, as shown above.
If we can match the score, then we indirectly match the probability distributions without needing to first compute the partition function. This is the idea behind score matching.
Visualization of Score Matching and Potentials
Show the code
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import seaborn as sns
# Set the Seaborn style for modern-looking plots
sns.set(style="whitegrid", context="talk")
# Define the potential functions
def potential_model(x, shift=0):
"""Model potential with an optional scalar shift."""
return 0.5 * x**2 + shift # Quadratic potential
def potential_data(x):
"""Data potential."""
return 0.5 * x**2 # Quadratic potential with no shift
# Analytical gradients (scores)
def gradient_potential_model(x):
"""Gradient of the model potential with respect to x."""
return x
def gradient_potential_data(x):
"""Gradient of the data potential with respect to x."""
return x
# Define the range of x values
x = np.linspace(-3, 3, 500)
# Compute potentials
model_potential = potential_model(x, shift=1)
data_potential = potential_data(x)
# Compute gradients (scores)
model_gradient = gradient_potential_model(x)
data_gradient = gradient_potential_data(x)
# Compute partition functions for normalization
dx = x[1] - x[0] # Differential element for integration
Z_model = np.sum(np.exp(-model_potential)) * dx
Z_data = np.sum(np.exp(-data_potential)) * dx
# Compute normalized probability densities
normalized_model = np.exp(-model_potential) / Z_model
normalized_data = np.exp(-data_potential) / Z_data
# Create DataFrames for plotting with Seaborn
df_potentials = pd.DataFrame({
'x': np.tile(x, 2),
'Potential': np.concatenate([model_potential, data_potential]),
'Type': ['Model Potential (shift=1)'] * len(x) + ['Data Potential (no shift)'] * len(x)
})
df_gradients = pd.DataFrame({
'x': np.tile(x, 2),
'Gradient': np.concatenate([model_gradient, data_gradient]),
'Type': ['Gradient of Model Potential'] * len(x) + ['Gradient of Data Potential'] * len(x)
})
df_normalized = pd.DataFrame({
'x': np.tile(x, 2),
'Probability Density': np.concatenate([normalized_model, normalized_data]),
'Type': ['Normalized Model Potential'] * len(x) + ['Normalized Data Potential'] * len(x)
})
figsize = (5, 3)
# Define custom dash patterns
dash_styles = {
'Model Potential (shift=1)': '',
'Data Potential (no shift)': (5, 5), # Solid line
'Gradient of Model Potential': '',
'Gradient of Data Potential': (5, 5),
'Normalized Model Potential': '',
'Normalized Data Potential': (5, 5)
}
plt.figure(figsize=figsize)
# Plot potentials
sns.lineplot(
data=df_potentials,
x='x',
y='Potential',
hue='Type',
style='Type',
dashes=dash_styles,
palette='deep',
)
plt.xlabel('x')
plt.ylabel('Potential Energy')
plt.legend(title='')
plt.show()
plt.figure(figsize=figsize)
# Plot gradients (scores)
sns.lineplot(
data=df_gradients,
x='x',
y='Gradient',
hue='Type',
style='Type',
dashes=dash_styles,
palette='muted',
)
plt.xlabel('x')
plt.ylabel('Gradient')
plt.legend(title='')
plt.show()
plt.figure(figsize=figsize)
# Plot normalized probability densities
sns.lineplot(
data=df_normalized,
x='x',
y='Probability Density',
hue='Type',
style='Type',
dashes=dash_styles,
palette='bright',
)
plt.xlabel('x')
plt.ylabel('Probability Density')
plt.legend(title='')
plt.show()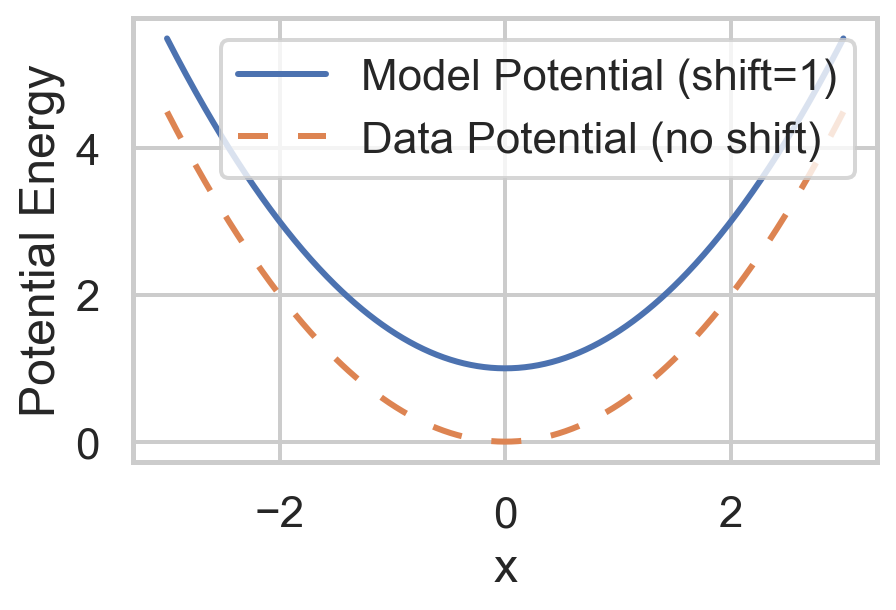
Eliminating True Score
The score for the data \(s_{\text{true}}\) is unknown, but it can be eliminated using calculus tricks, as shown in (Hyvärinen 2005). The expected squared difference can be rewritten as:
\[ \begin{align*} & \ \min_\theta \frac{1}{2} \mathbb{E} \left[ \left\| s_{\theta}(x) - s_{\text{true}}(x) \right\|^2 \right] \\ &= \min_\theta \frac{1}{2} \int_\Omega \left\| s_{\theta}(x) - s_{\text{true}}(x) \right\|^2 \pi(x) \, dx \\ &= \min_\theta \frac{1}{2} \int_\Omega \left\| s_{\theta}(x) \right\|^2 \pi(x) \, dx - \int_\Omega s_{\theta}(x)^\intercal s_{\text{true}}(x) \pi(x) \, dx + \frac{1}{2} \int_\Omega \left\| s_{\text{true}}(x) \right\|^2 \pi(x) \, dx \\ \end{align*} \]
But the last term does not depend on \(\theta\) — it cannot be changed by the optimization — so it can be discarded from the minimization problem:
\[ \begin{align*} &= \min_\theta \frac{1}{2} \int_\Omega \left\| s_{\theta}(x) \right\|^2 \pi(x) \, dx - \int_\Omega s_{\theta}(x)^\intercal s_{\text{true}}(x) \pi(x) \, dx \\ \end{align*} \]
To eliminate \(s_{\text{true}}\), the definition of the score can be used to rewrite the term:
\[ \begin{align*} & \ -\int_\Omega s_{\theta}(x)^\intercal s_{\text{true}}(x) \pi(x) \, dx\\ &= -\int_\Omega \pi(x) \left(\nabla_x \log(\pi(x))\right)^\intercal s_\theta(x) \, dx \\ & = -\int_\Omega \frac{\pi(x)}{\pi(x)}\left(\nabla_x \pi(x)\right)^\intercal s_\theta(x) \, dx \\ & = -\int_\Omega \nabla_x \pi(x)^\intercal s_\theta(x) \, dx \\ \end{align*} \]
Integration by parts allows the derivative to be moved from \(\pi\) onto the score term. If we assume that the probability of the true distribution goes to zero, \(\pi(x) \rightarrow 0\), at the boundaries \(\partial \Omega\), then the flux boundary term from integration by parts vanishes. When working with integration by parts in multivariable calculus, the gradient \(\nabla\) and negative divergence \(-\nabla \cdot\) operators are adjoints of each other, \(\nabla = (-\nabla \cdot)^\intercal\). This allows the derivative to be moved onto the score term:
\[ \begin{align*} & = -\int_\Omega \nabla_x \pi(x)^\intercal s_\theta(x) \, dx \\ &= -\int_{\partial \Omega} \pi(x) s_\theta(x) \cdot dx + \int_\Omega \pi(x) \nabla_x \cdot s_\theta(x) \, dx \\ &= \int_\Omega \pi(x) \nabla_x \cdot s_\theta(x) \, dx \\ &= -\int_\Omega \pi(x) \nabla_x^2 \phi(x;\theta) \, dx \\ \end{align*} \]
where the last equality uses \(s_\theta = -\nabla_x \phi\), so \(\nabla_x \cdot s_\theta = -\nabla_x^2 \phi\). Back in the minimization problem, this term can be substituted in:
\[ \begin{align*} & \ \min_\theta \frac{1}{2} \mathbb{E}_{x \sim \pi(x)} \left[ \left\| s_{\theta}(x) - s_{\text{true}}(x) \right\|^2 \right]\\ &= \min_\theta \frac{1}{2} \int_\Omega \left\| \nabla_x \phi(x;\theta) \right\|^2 \pi(x) \, dx - \int_\Omega \pi(x) \nabla_x^2 \phi(x;\theta) \, dx \\ &= \min_{\theta} \mathbb{E}_{x \sim \pi(x)} \left[ \frac{1}{2} \left\| \nabla_x \phi(x;\theta) \right\|^2 - \nabla_x^2 \phi(x;\theta) \right] \\ \end{align*} \]
Evaluation of the Objective
The minimization objective no longer requires the true score, which has been eliminated. The \(\nabla_x^2 \phi(x;\theta)\) term denotes the Laplacian of the potential, which can be evaluated as the trace of the Hessian matrix of the potential function \(\phi(x;\theta)\):
\[ \nabla_x^2 \phi(x;\theta) = \text{Tr} \left( H_\phi(x;\theta) \right) = \sum_i \frac{\partial^2 \phi(x;\theta)}{\partial x_i^2} \]
The \(-\nabla_x^2 \phi(x;\theta)\) component rewards positive curvature of the potential at the sample locations: minimizing it encourages the potential to curve upward, like a bowl, around regions of high data density, which corresponds to sharp peaks in the probability distribution. It can be thought of as a term that prefers peaked distributions.
The \(\frac{1}{2}\left\| \nabla_x \phi(x;\theta) \right\|^2\) term is the squared norm of the gradient, which penalizes large gradients. With this term alone, the optimal potential would be as flat as possible to make the gradient as small as possible. It is the opposition between these two terms in the minimization objective that leads to a balanced, matched distribution.
In practice, we can estimate the true expectation over all \(x\) by sampling from the data distribution. One such way is to use the empirical samples \(\{x_1, x_2, \ldots, x_N\}\) to estimate the expectation. If they are assumed to be i.i.d. samples from the data distribution, the expectation can be approximated as:
\[ \begin{align*} \mathbb{E}_{x \sim \pi(x)} \left[ \frac{1}{2} \left\| \nabla_x \phi(x;\theta) \right\|^2 - \nabla_x^2 \phi(x;\theta) \right] &\approx \frac{1}{N} \sum_{i=1}^N \left( \frac{1}{2} \left\| \nabla_x \phi(x_i;\theta) \right\|^2 - \nabla_x^2 \phi(x_i;\theta) \right) \\ \end{align*} \]
This can be applied to all samples, or to batches of samples, to get a gradient estimate for the minimization objective in \(\theta\):
\[ \begin{align*} g &\approx \nabla_\theta \left[ \frac{1}{N} \sum_{i=1}^N \left( \frac{1}{2} \left\| \nabla_x \phi(x_i;\theta) \right\|^2 - \nabla_x^2 \phi(x_i;\theta) \right) \right] \\ \end{align*} \]
Computing the Laplacian
The Laplacian of the potential function \(\phi(x;\theta)\) can be computed as the trace of its Hessian matrix:
\[ \begin{align*} \nabla_x^2 \phi(x;\theta) &= \text{tr} \left( H_\phi(x;\theta) \right) \\ &= \sum_i \frac{\partial^2 \phi(x;\theta)}{\partial x_i^2} \end{align*} \]
The trace of a matrix such as the Hessian, which is a linear operator, can be estimated without knowing the explicit matrix. For example, the Hessian may be an operator that is too large to store in memory, or it may not be explicitly known even though the matrix-vector product \(Hv\) can be computed.
A process first proposed by Hutchinson (Hutchinson 1990), an example of randomized linear algebra, allows for computing the trace when only the matrix-vector product is available. A random variable is used to sample as follows:
\[ \begin{align*} \text{tr} \left(A\right) &= \text{tr} \left(AI\right) \\ &= \text{tr} \left( A \, \mathbb{E}_{x\sim\mathcal{N}(0,I)} \left[ x x^\intercal \right] \right)\\ &= \mathbb{E}_{x\sim\mathcal{N}(0,I)} \left[ \text{tr} \left( A x x^\intercal \right) \right]\\ &= \mathbb{E} \left[ x^\intercal A x \right]\\ &\approxeq \frac{1}{N} \sum_{i=1}^N x_i^\intercal A x_i \end{align*} \]
The standard normal distribution by definition has identity covariance \(I\), so the expectation of the outer product of the random variable \(x\) is the identity matrix. Other random variables can be used as well; further details on the process can be found in Bai, Fahey, and Golub (Bai et al. 1996).
Applications of Learned Score
MAP Estimation
Now that we have a method to learn the score of a distribution, it can be used as the regularization term of the gradient in MAP estimation. In Lecture 10, the score was used as part of the MAP minimization gradient.
So, using many empirically drawn samples \(x_i\), the \(\pi(x)\) distribution can be indirectly estimated using score matching, learning the score \(s(x, \theta)\). The learned score can then be used in the gradient of the MAP estimation problem, where it represents the regularization term, informed by the prior distribution \(\pi(x)\). In the case of a matrix operator for the forward problem, \(F(x) = Ax\), the Jacobian is simply the matrix operator itself: \(J(x) = A\).
Diffusion Models and Homotopy
In Lecture 7, the concept of a homotopy between two functions was introduced. A homotopy provides a continuous path between a smoothing function \(g(x)\) and a target function \(f(x)\), parameterized by a scalar \(t\) (note that the orientation of \(t\) here is reversed relative to Lecture 7, with \(t = 1\) now corresponding to the target): \[ h(x, t) = t f(x) + (1-t) g(x) \]
Proposition: Convolution of Random Variables
The probability distribution of the sum of two independent random variables is the convolution of their probability distributions. If \(X \sim \pi_x(x)\) and \(Y \sim \pi_y(y)\), then the sum \(W = X + Y\) has a probability distribution \(\pi_w(w)\) that is the convolution of the two distributions:
\[ \begin{align*} \pi_w(w) &= \int \pi_x(x) \pi_y(w-x) \, dx \\ \end{align*} \]
For a dataset \(x\sim \pi(x)\) and a latent variable \(z\sim \mathcal{N}(0, I)\), define a new random variable \(x_t\) that is a weighted sum of the two variables:
\[ x_t = \sqrt{t}\,x + \sqrt{1-t}\, z \]
The homotopy proceeds slightly differently with this time scheduling, but it still begins and ends with the starting and target distributions. The density of this new random variable \(x_t\) is the convolution of the two component densities — the density of \(\sqrt{t}\,x\) convolved with \(\mathcal{N}(0, (1-t)I)\):
\[ \pi(x_t) \propto \int \pi\left(\frac{x_t-\xi}{\sqrt{t}}\right) \exp\left(-\frac{\|\xi\|^2}{2(1-t)}\right) \, d\xi \]